2.2 KiB
Executable File
2.2 KiB
Executable File
graspnetAPI
![]()
Dataset
Visit the GraspNet Website to get the dataset.
Install
You can install using pip.
pip install graspnetAPI
You can also install from source.
git clone https://github.com/graspnet/graspnetAPI.git
cd graspnetAPI
pip install .
Document
Refer to online document for more details.
PDF Document is available, too.
You can also build the doc manually.
cd docs
pip install -r requirements.txt
bash build_doc.sh
LaTeX is required to build the pdf, but html can be built anyway.
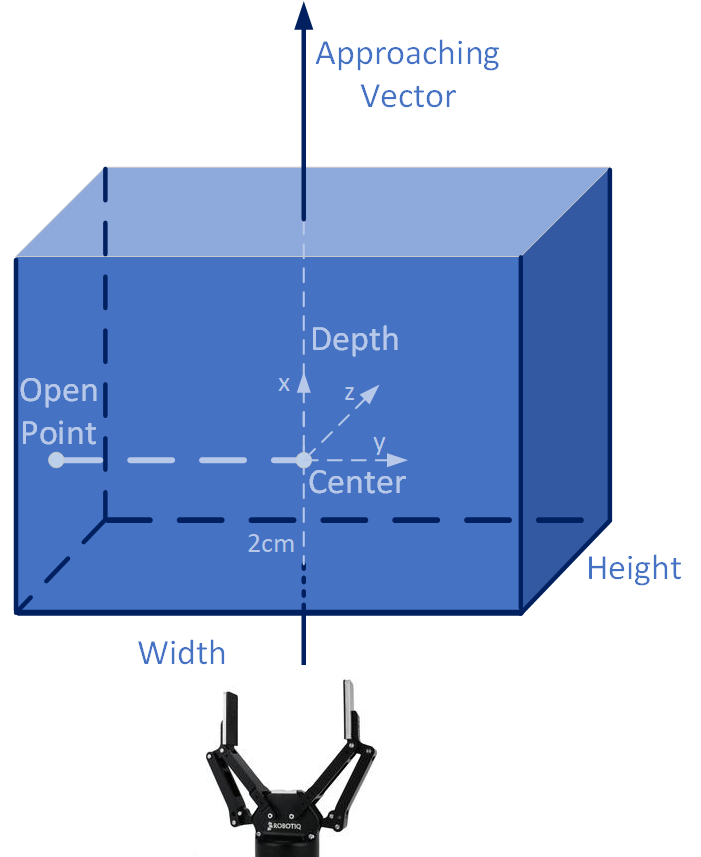
Grasp Definition
The frame of our gripper is defined as
Examples
cd examples
# change the path of graspnet root
# How to load labels from graspnet.
python3 exam_loadGrasp.py
# How to convert between 6d and rectangle grasps.
python3 exam_convert.py
# Check the completeness of the data.
python3 exam_check_data.py
# you can also run other examples
Please refer to our document for more examples.
Citation
Please cite these papers in your publications if it helps your research:
@article{fang2023robust,
title={Robust grasping across diverse sensor qualities: The GraspNet-1Billion dataset},
author={Fang, Hao-Shu and Gou, Minghao and Wang, Chenxi and Lu, Cewu},
journal={The International Journal of Robotics Research},
year={2023},
publisher={SAGE Publications Sage UK: London, England}
}
@inproceedings{fang2020graspnet,
title={GraspNet-1Billion: A Large-Scale Benchmark for General Object Grasping},
author={Fang, Hao-Shu and Wang, Chenxi and Gou, Minghao and Lu, Cewu},
booktitle={Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition(CVPR)},
pages={11444--11453},
year={2020}
}
Change Log
1.2.6
- Add transformation for Grasp and GraspGroup.
1.2.7
- Add inpainting for depth image.
1.2.8
- Minor fix bug on loadScenePointCloud.